【OpenCV教程】滤波和边缘检测的过程
1.均值滤波
1.1 卷积核形状
Mat kernal=Mat::ones(Size(ksize,ksize),CV_64F)/(ksize*ksize);1.2 API
CV_EXPORTS_W void blur( InputArray src, OutputArray dst,
Size ksize, Point anchor = Point(-1,-1),
int borderType = BORDER_DEFAULT );参数
含义
1.3 效果

2.高斯滤波
2.1 卷积核形状

2.2 API
参数
含义
2.3 效果

3.中值滤波
3.1 原理
3.2 API
参数
含义
3.3 效果

4.高斯双边滤波
4.1 原理

4.2 API
参数
含义
4.3 效果

5.获取用来形态学操作的滤波器
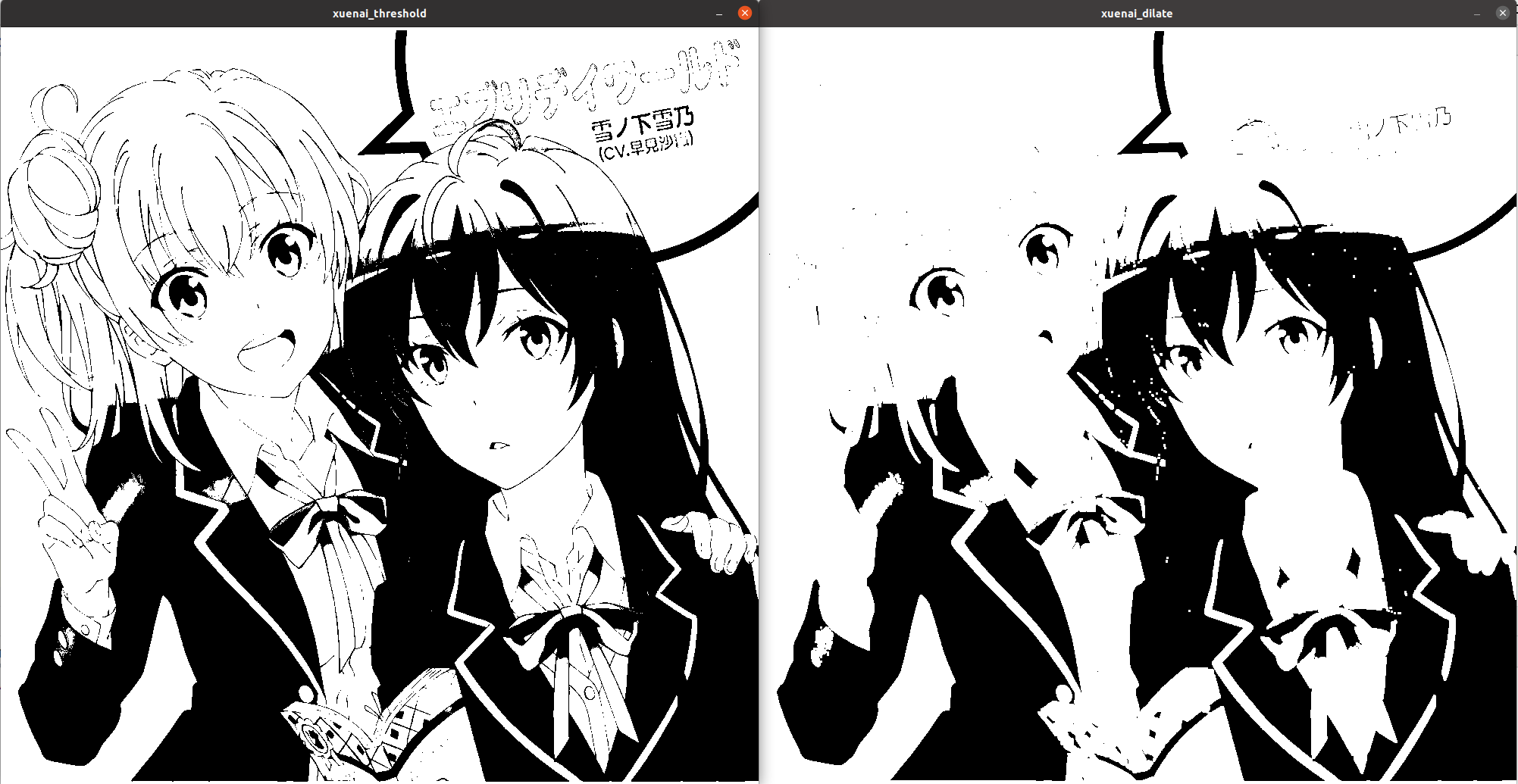
6.腐蚀和膨胀(对二值图)
6.1 原理
6.2 腐蚀API
参数
含义
6.3 效果

6.4 膨胀API
参数
含义
6.5 效果
7.形态学操作(对二值图)
7.1 API
参数
含义
7.2 变换类型
7.3 开
原理
效果

7.4 闭
原理
效果

7.5 顶帽
原理
效果

7.6 黑帽
原理
效果
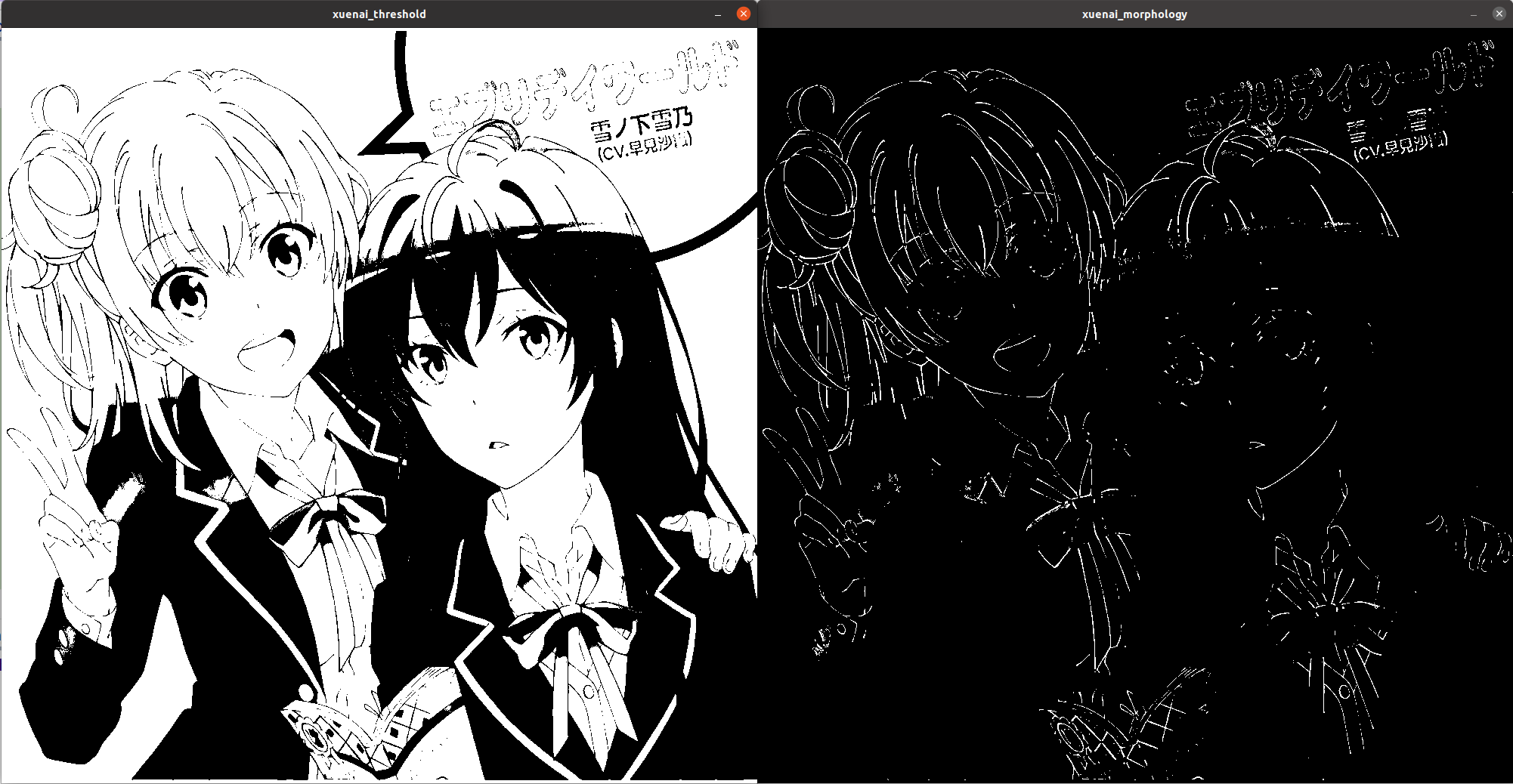
7.7 形态学梯度
原理
效果

7.8 击中击不中变换
原理



8.边缘检测:选择合适的输出深度
int sdepth
int ddepth
8.1 normalize归一化函数
参数
含义
归一化类型(只介绍常用的四种)
8.2 convertScaleAbs绝对值化
参数
含义
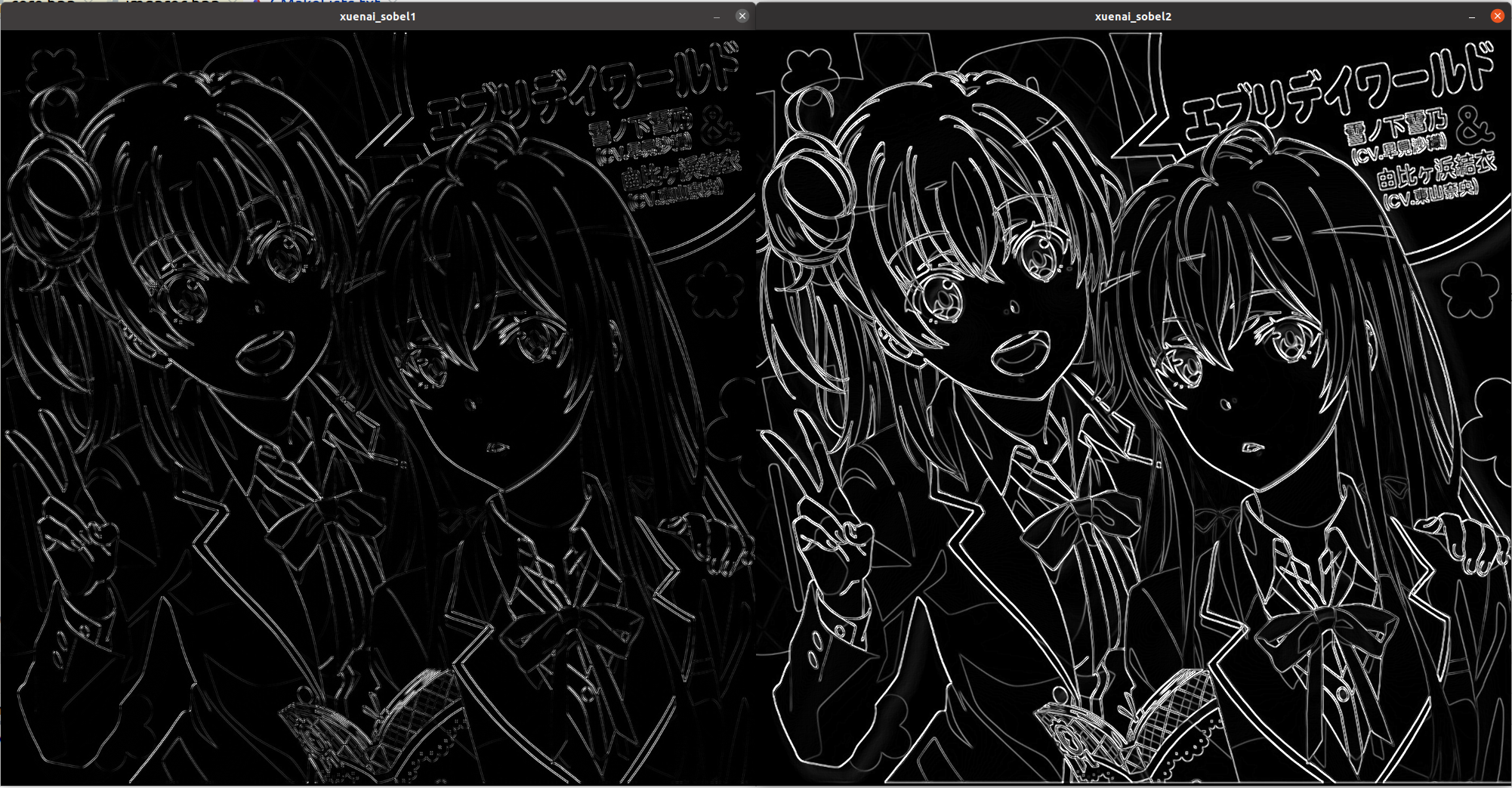
9.sobel(对灰度图)
9.1 卷积核形状(ksize=3)
9.2 API
参数
含义
9.3 流程
9.4 同时在x,y方向上调用Sobel和分开调用的效果对比
10.scharr(对灰度图)
10.1 卷积核形状(ksize恒定为3)
10.2 API
参数
含义
10.3 流程
11.Laplacian(对灰度图)
11.1 卷积核形状(ksize=3)
11.2 API
参数
含义
11.3 流程
12.Canny(recommended)
12.1 API
参数
含义
12.2 流程
12.3 效果

13.添加噪声
13.1 椒盐噪声
13.2 高斯噪声
随机数填充矩阵
参数
含义
最后更新于