【Linux】python版本控制和环境管理
1.查看目前python的版本
python --versionPython 3.9.182.添加软件源并更新
sudo add-apt-repository ppa:deadsnakes/ppa
sudo apt update3.选择你想要下载的版本
sudo apt install python3.94.警示:没必要设置默认版本
误区
千万千万不要覆盖python3软链接
python3软链接解决办法
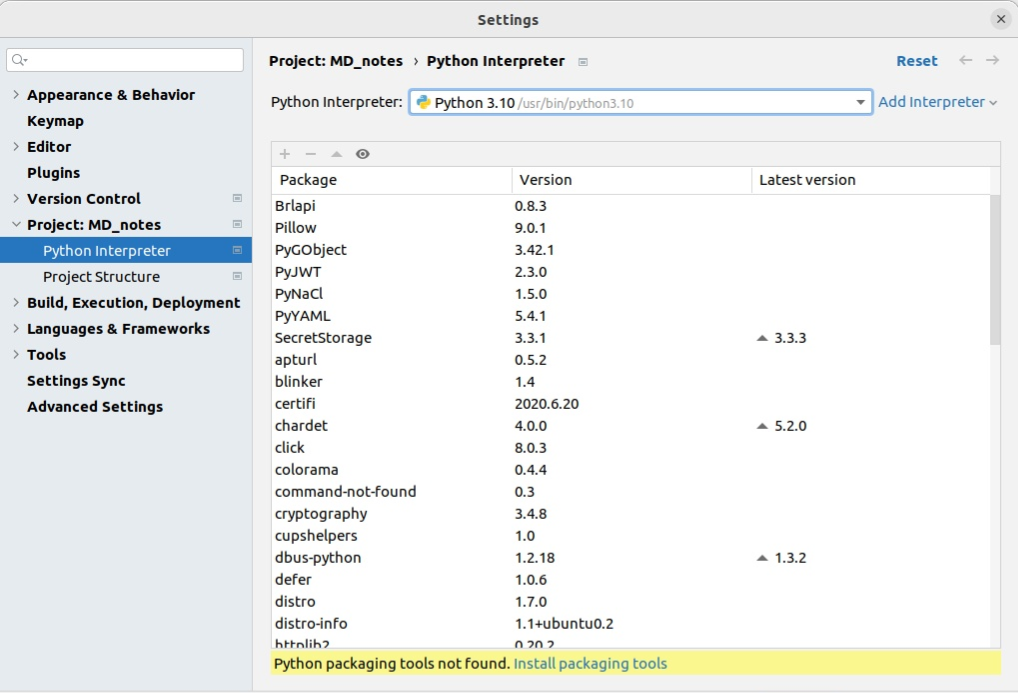
5.pip软件包管理
最省心
稍微麻烦
换源
最后更新于